Kia Stonic (YB): Elektrisch verchromter Innenrückspiegel / Sensor für hintere Einpark-Abstandswarnung (PDW-R)
Technische daten
| SPEZIFIKATION |
|
Pos. |
SPEZIFIKATION |
|
|
Ultraschallsensor |
Nennspannung |
Gleichstrom 12 V |
|
Erkennungsbereich |
(30 - 120cm) |
|
|
Betriebstemperatur |
Gleichstrom 9 ~ 16 V |
|
|
Betriebsstrom |
MAX 350 mA |
|
|
Betriebstemperatur |
-30 - 80 °C |
|
|
Arbeitsfrequenz |
48 ± 5 KHz |
|
|
Anzahl der Sensoren |
4 Stck. |
|
Bauteile und bauteile-Übersicht
| BAUTEILE-ÜBERSICHT |
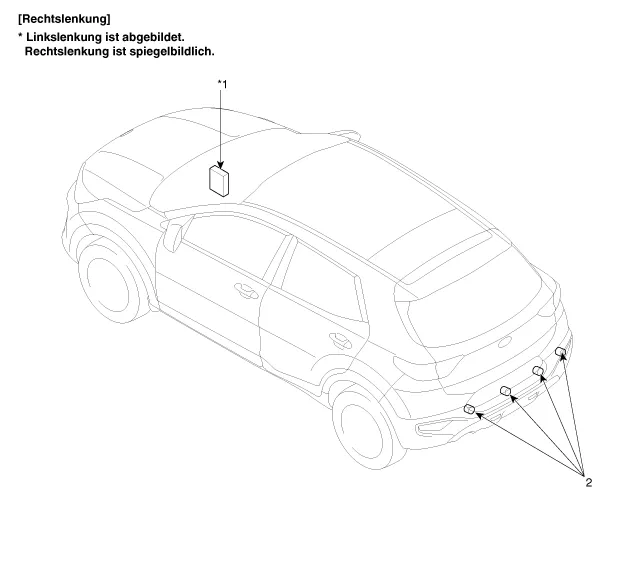
| 1. Karosserie-Steuermodul (BCM)
|
2. Sensor für Einpark-Abstandswarnung
|
Die Funktion für Einpark-Abstandswarnung hinten ist in das BCM (Karosseriesteuermodul) eingebaut. |

Beschreibung und bedienung
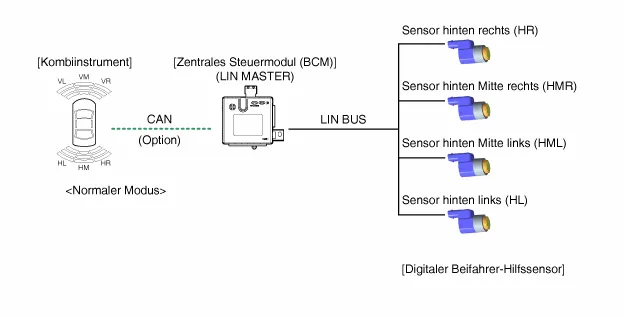
| SYSTEMÜBERSICHT |
Das PDW-R (System für hintere Einpark-Abstandswarnung) ist eine elektronische Fahrhilfe, die beim Einparken bzw. beim Fahren mit niedriger Geschwindigkeit Warnungen für den Fahrer ausgibt. Der Sensor verwendet Ultraschallwellen um Objekte in der Nähe des Fahrzeugs zu erfassen.
Das PDW-R-System besteht aus vier PDW-R-Sensoren, die Hindernisse erkennen und das Ergebnis getrennt nach drei Warnstufen (1./2./3.) über die LIN-Kommunikationsleitung an das BCM senden. Das BCM legt die Alarmstufe anhand der von den Slave-Sensoren übermittelten Meldungen fest und betätigt das akustische Signal oder überträgt die Daten an die Anzeige.
Systembetrieb-Spezifikation
| 1. |
INIT-Modus
|
| 2. |
NORMALMODUS
|
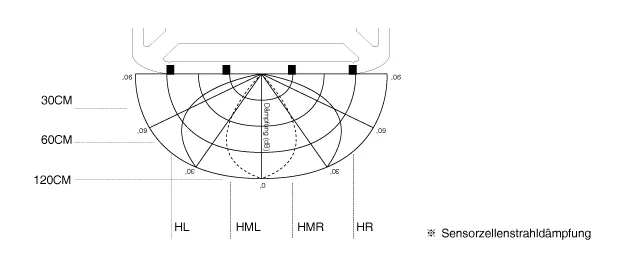
Erfassungsbereich
| 1. |
Messbedingung - PVC-Stab (Durchmesser 75 mm, Länge 1m), normale Temperatur |
| 2. |
Abstand zwischen Erfassungsobjekten (Messung direkt vor dem Sensor) 61 cm ~ 120 cm: ± 15 cm 31 cm ~ 60 cm: ± 15 cm Unter 30 cm: ± 10 cm |
Horizontaler Erfassungsbereich
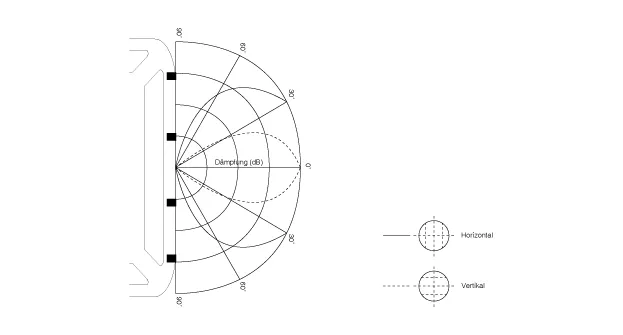
Vertikaler Erfassungsbereich
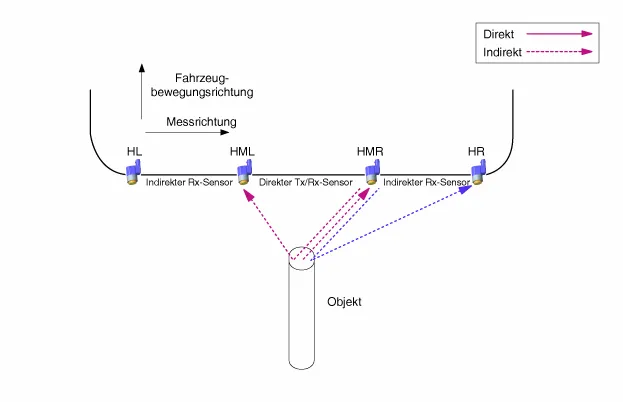
Abstandsmessung
| Direkte Messung |
Übertragung und Empfang werden mit einem Sensor ausgeführt
(Ausführung für die einzelnen Sensoren RL, RCL, RCR, RR)
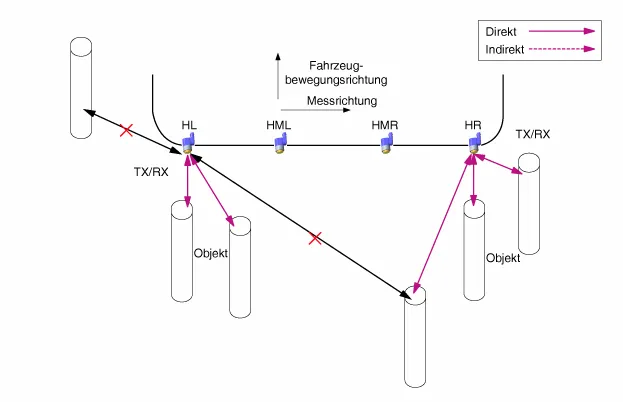
| Indirekte Messung |
(RCL → RL, RCL → RCR, RCR → RCL, RCR → RR Ausführung in Reihenfolge)
Bei zwei oder mehreren Sensoren sendet einer die Übertragung und die anderen empfangen.

| Gleichzeitige direkte und indirekte Messung |
Bei zwei oder drei Sensoren sendet und empfängt ein Sensor und die anderen empfangen nur.
PDW-R-Alarmsystem
Wird ein Gegenstand vom PDW-R-Sensor erfasst, wird eine akustische Warnung, z.B. mit einem Warnsummer ausgelöst. Der PDW-R-Sensor sendet die Daten über LIN-Kommunikation an das BCM, und das BCM sorgt für die Ausgabe der akustischen Warnung für den jeweiligen PDW-R-SENSOR je nach Priorität. Wird ein Anzeige-Alarm an den Instrumentenblock gesendet, dient das BCM nur als Gateway.
| – |
Verarbeitung der Warnsensor/-Anzeigedaten durch BCM Für die Sensordaten RL/RR verarbeitet das BCM die einzelnen Sensordaten direkt anhand der Anzeige- und Warnsummer-Ausgangssignale. Beim Warnsummer-Ausgangssignal für den CL/CR-Sensor verarbeitet das BCM die Daten zentral entsprechend der Priorität für beide Sensoren. |
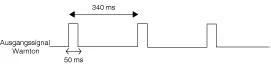
Systembetrieb-Spez.
Ist das System eingeschaltet (nach Einschalten der Zündung und Schalten in den Rückwärtsgang) prüft MICOM alle Sensorkanäle. Wenn ein Fehler gefunden wird, ertönt das akustische Signal nach 500 ms 300 ms lang. Wird ein Fehler sogar in einem Sensor gefunden, ertönt ein akustisches Signal entsprechend dem defekten Sensor anstelle eines anfänglichen Startalarms. Das Umstellen auf Normalmodus geschieht wie folgt.
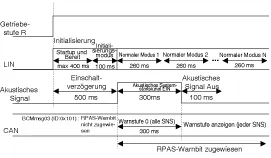
Bei eingelegtem Rückwärtsgang arbeitet das System wie folgt.

Bei nicht eingelegtem Rückwärtsgang arbeitet das System wie folgt.
※ Der zulässige Fehlerbereich der Wellenform beträgt ±10%.
Einteilung der Spezifikation für Alarmausgabe anhand des Abstands zwischen den Sensoren
Die Bedingungslogik je nach Priorität der Alarmstufe wird wie folgt festgelegt. (identischer Sensor)
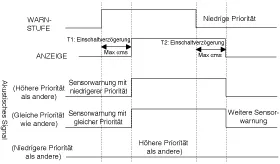
*Definition des Wertes β
| 1. |
Sensor mit niedriger Priorität AUS: α = 0 ms |
| 2. |
1. Warnstufe für Sensor mit niedriger Priorität: α < 340 ms |
| 3. |
2. Warnstufe für Sensor mit niedriger Priorität: α < 170 ms |
*Definition des Wertes β
| 1. |
1. Warnstufe für Sensor mit niedriger Priorität: β = 1700 ms |
| 2. |
2. Warnstufe für Sensor mit niedriger Priorität: β = 1700 ms |
| 3. |
3. Warnstufe für Sensor mit niedriger Priorität: β = 700 ms |
Die Alarmsteuerung über die Abstandserkennung funktioniert wie folgt:
| 1. |
Erster Warnbereich (81cm - 120cm)
|
| 2. |
Zweiter Warnbereich (41cm - 80cm)
|

| 3. |
Dritter Warnbereich (unter 40cm)
|

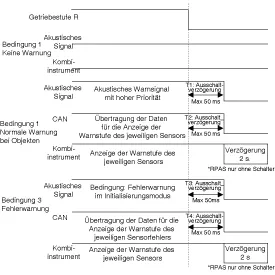
Sichtbare Alarmanzeige Spezifikation
Wird das Getriebe in die Stellung R geschaltet, so reagieren die Kontrollleuchten am Kombiinstrument gemäß der folgenden Abbildungen.
Wenn das System ein Objekt erfasst, wird die entsprechende Anzeige umgehend eingeschaltet. Wenn ein Objekt während der PDW-R-Erfassung verschwindet, bleibt die Anzeige noch 2 s an, bevor sie erlischt.
(Wenn aber vom Alarm der dritten Stufe zum Status Kein Alarm gewechselt wird, schaltet sich der Alarm der dritten Stufe 2 s lang ein und geht dann aus.)

| – |
Es wird nur die erfasste Position von Hindernissen angezeigt. |
| – |
Beim Alarm der dritten Stufe flackert die Anzeige in Intervallen von einer Sekunde. |
| – |
Im normalen Alarmmodus, integriertes Display von RCR/RCL |
Kommunikationsstandard
Dieser Abschnitt definiert die Kommunikation zwischen PDW-R und BCM.
Das PDW-R sendet das Erfassungsergebnis für einen Gegenstand und das Sensor-Diagnoseergebnis zum BCM. Anhand dieser Daten bewertet das BCM die Alarmbedingung.
Die Anzeige zeigt die Übertragungsposition und die Alarmdaten; im Alarmmodus haben die nächsten Einträge bzw. Alarme bei DATA Priorität.
(Bsp.: Wenn RL der erste Alarm ist und RR der dritte Schritt, hat der RR-Alarm Priorität.)
- Sensor für hintere Einpark-Abstandswarnung (PDW-R)
- Türverriegelung
- Elektrisches Türverriegelungsmodul
- Zentralverriegelungsschalter
Technische daten Technische Daten Bauteil Technische Daten Nennspannung Gleichstrom 12 V Betriebstemperaturbereich -30 - 80 °C Nennbelastung WASCHANLAGE Waschanlage: 6A (Motorlast) Bauteile und bauteile-Übersicht BAUTEILE-ÜBERSICHT 1 .
Bauteile und bauteile-Übersicht BAUTEILE-ÜBERSICHT Reparaturverfahren Ausbau 1. Batteriemassekabel abklemmen.
Weitere Informationen:
Kia Stonic (YB) Reparaturanleitung: Schalter Scheibenwischer / Waschanlage vorn
Reparaturverfahren Ausbau 1. Batteriemassekabel abklemmen. 2. Das Lenkrad entfernen. (Siehe Lenkung - "Lenkrad") 3. Schrauben lösen und die obere und untere Abdeckung der Lenksäule abnehmen.
Kia Stonic (YB) Reparaturanleitung: Verdampfer-Wärmetauscher
Reparaturverfahren AUS- UND EINBAU 1. Batteriemassekabel abklemmen. 2. Heizungseinheit ausbauen und Gebläseeinheit von der Heizungseinheit trennen. (Siehe Heizung - "Heizung") 3.
Kategorien
- Handbücher Startseite
- Kia Stonic Bedienungsanleitung
- Kia Stonic Werkstatthandbuch
- Heizung, Lüftung und Klimaanlage
- Zündkerze
- Ihr Fahrzeug im Überblick
- Neu auf der Seite
- Wichtigste Infos zum Auto
